A much easier problem is to plan a path for a single point in any space. So the solution is to reduce the robot to a point, and represent the obstacles in such a way that representing the robot as a point makes sense. This means, planning a path for a point in robot's configuration space (aka c-space) rather than the workspace.
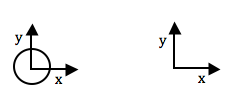
| A planar, circular omni-drive robot has 2 degrees of freedom: (x,y). Therefore, its configuration space is &real2. |
|
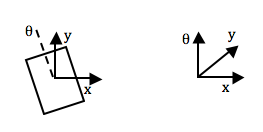
| A planar odometry robot capable of translation and rotation has 3 degrees of freedom: (x,y,&theta). Therefore, its configuration space will be three-dimensional, where dimensions 1 and 2 are real, and dimension 3 is toroidal (wrapping on itself like a donught) with point coordinates between 0 and 360 degrees. |
|
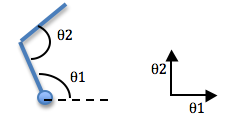
| A planar 2-link arm robot fixed at the based and with two revolute (rotational) joints, one at the base, and one at the elbow, has 2 DOFs (one for each joint): (&theta1, &theta2). Its configuration space will be a 2D toroidal space where dimension 1 corresponds to possible &theta1 angles (from 0 to 360) and dimension 2 corresponds to possible &theta2 angles (from 0 to 360). |
|
For the planar omni-drive robot above, an obstacle in c-space is a set of (x,y)-positions of the robot that are not allowed (because the robot would be colliding with an obstacle if it tried to achieve that position). For the planar robot that is capable of rotation, it is the set of (x,y)-positions at every orientation angle &theta that correspond to collisions with obstacles. For the 2-link arm robot, it is the set of all joint angles (&theta1,&theta2) that correspond to collisions with obstacles.
Formally, points are vectors in &real2 with coordinates
(x,y). Regions of space are sets and subsets of points, e.g., if the
workspace has boundaries it is a subset of &real2: W
&sub &real2. We define addition for sets
as follows:
A &oplus B = {a + b | a &isin A, b &isin B}
where a,b &isin &real2, so can be added etc. as
vectors. Similarly for substraction.
Let the robot or other moving object be denoted by set A, and the
obstacle or stationary object be denoted by set B. We define an
arbitrary reference point on A and a local coordinate system. The
configuration space obstacle produced by B relative to A
is:
COA(B) = {(x,y) &isin W | (x,y) &oplus A &cap B
&ne 0}
The configuration space obstacle is the set of worspace points such
that when you add all of the robot points to them, they will intersect
the workspace obstacle. This is exactly our intuitive definition.
This definition isn't very useful for construction purposes, but it
can be rewritten as:
COA(B) =
Or, in English: the union (the totality) of all points we get by
substracting all of the points in A from all points inside of B. This
is equivalent to adding all of the points in -A, which leads to a
construction algorithm.
If both A and B are convex, then the above equation is equivalent to
COA(B) = convexhull({v - A | v is a vertex of B}).
The convex hull of a set of points is the minimum convex set that
encompasses all points in the original set. If you think of each point
in the set as a peg poking out from the ground, and you stretch a
rubber band around all of the pegs, the rubber band is the boundary of
the convex hull.
So, here is our algorithm for computing the configuration space obstacles for a convex robot A capable of translational motion only in a 2D workspace W with convex obstacle B:
 Reflect robot
about origin. Attach at every obstacle vertex. Reflect robot
about origin. Attach at every obstacle vertex. |
 Compute convex hull. |
Now you can plan a path for the reference point in the c-space, and it will correspond to a collision-free path for the robot in the workspace.

What if A and B are not convex? You can treat them as the union of convex sub-parts, compute the c-space obstacle subsets for each of the sub-parts, then take the union of the c-space obstacle subsets.
 For a planar robot with DOFs for both position (x,y) and orientation
(&theta), a configuration is a point in 3D space, whose third
dimension is toroidal with coordinates between 0 and 360
degrees. C-space obstacles for such a robot will look like "columns"
of 2D c-space "slices", where each such "slice" corresponds to the
robot shape relative to the workspace when it is oriented at a
particular angle &theta. These columns will have complicated,
non-polyherdral shapes, but can be approximated with a number of
projection "slices" at a resolution necessary for the robot control.
For a planar robot with DOFs for both position (x,y) and orientation
(&theta), a configuration is a point in 3D space, whose third
dimension is toroidal with coordinates between 0 and 360
degrees. C-space obstacles for such a robot will look like "columns"
of 2D c-space "slices", where each such "slice" corresponds to the
robot shape relative to the workspace when it is oriented at a
particular angle &theta. These columns will have complicated,
non-polyherdral shapes, but can be approximated with a number of
projection "slices" at a resolution necessary for the robot control.