First, build an HMM simulator so that you have a source of ``observations''
and a target to compare against. To do this, we will build an MM, and then we
will proceed to ``hide'' it from the HMM trainer. I suggest creating code
that can manage N states, numbered
0, ... N - 1, and
M different kinds of observations, numbered
0, ... M - 1,
and which produces observations of length T. In other words, N,
M and T are parameters of your Markov model. Initially, I suggest
that we attempt to train models where N = 3, M = 4 and T varies
from 3 to 5. Here is an example.
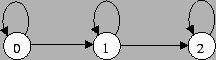
If this above model splits its transition probabilities 3:1 in favor of going ``right'', then the transition probability matrix is as follows.
| ai, j | 0 | 1 | 2 |
| 0 | 0.25 | 0.75 | 0 |
| 1 | 0 | 0.25 | 0.75 |
| 2 | 0 | 0 | 1.0 |
Let's assume that this model always starts in state 0.
| 0 | 1 | 2 | |
| 1.0 | 0 | 0 |
Finally, there are four observations, 0, 1, 2 and 3, with the following probabilities per state.
| bi(k) | 0 | 1 | 2 | 3 |
| 0 | 0.5 | 0.5 | 0 | 0 |
| 1 | 0 | 0.5 | 0.5 | 0 |
| 2 | 0 | 0 | 0.5 | 0.5 |
To build the MM, use a Monte Carlo simulation. First, you'll need
a random number generator. In C, use the random() function (see manual page),
seeded by srandom() using the data from a call to time() (see manual page).1 Once random() is seeded, you can easily define a function randomint(lb, ub)
that returns a random integer x in the range lb![]() x <ub.2
x <ub.2
int randomint (int lb, int ub) {
return lb + random() % (ub - lb);
}
You can also define a function that returns a random
floating point number x in the range
0 ![]() x
x ![]() 1.
1.
double randomreal () {
return ((double) random()) / RAND_MAX;
}
To generate a random choice over a given distribution, simply do the following.
Assume we wish to generate the initial state according to ![]() .
.
function newsequence (
N, M,![]() , a, b, T)
, a, b, T)