Projects
- Project 1 --- Navigate an Unknown Maze --- undergraduate version and graduate version
- Project 2
Final projects (project 2)
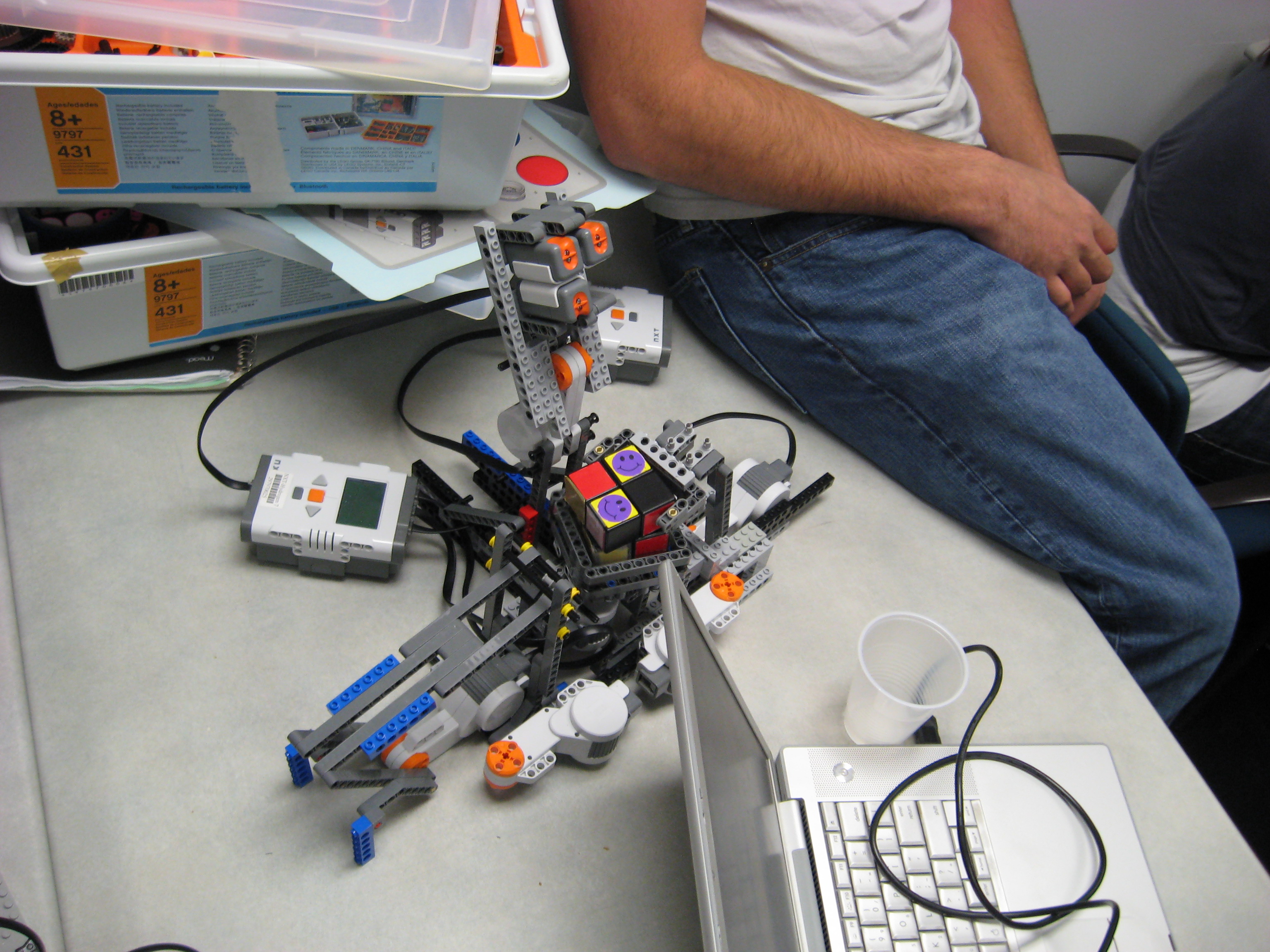
Rubik's Cube Solver - Amaro Taylor and Jamie Altreuter
A robot to solve a scrambled 2x2x2 Rubik's cube. The robot uses a single light sensor to distinguish between face colors and read in the scrambled position. The design is based on a rotating basket housing the cube, two actuated arms to flip the cube over, and the actuated sensor head to position the sensor near the surface to be read.
| Final demo photo [[RubiksCubeSolver.jpg]] | Final demo video [[RubiksCubeSolver.mov]] double-click to start |
|
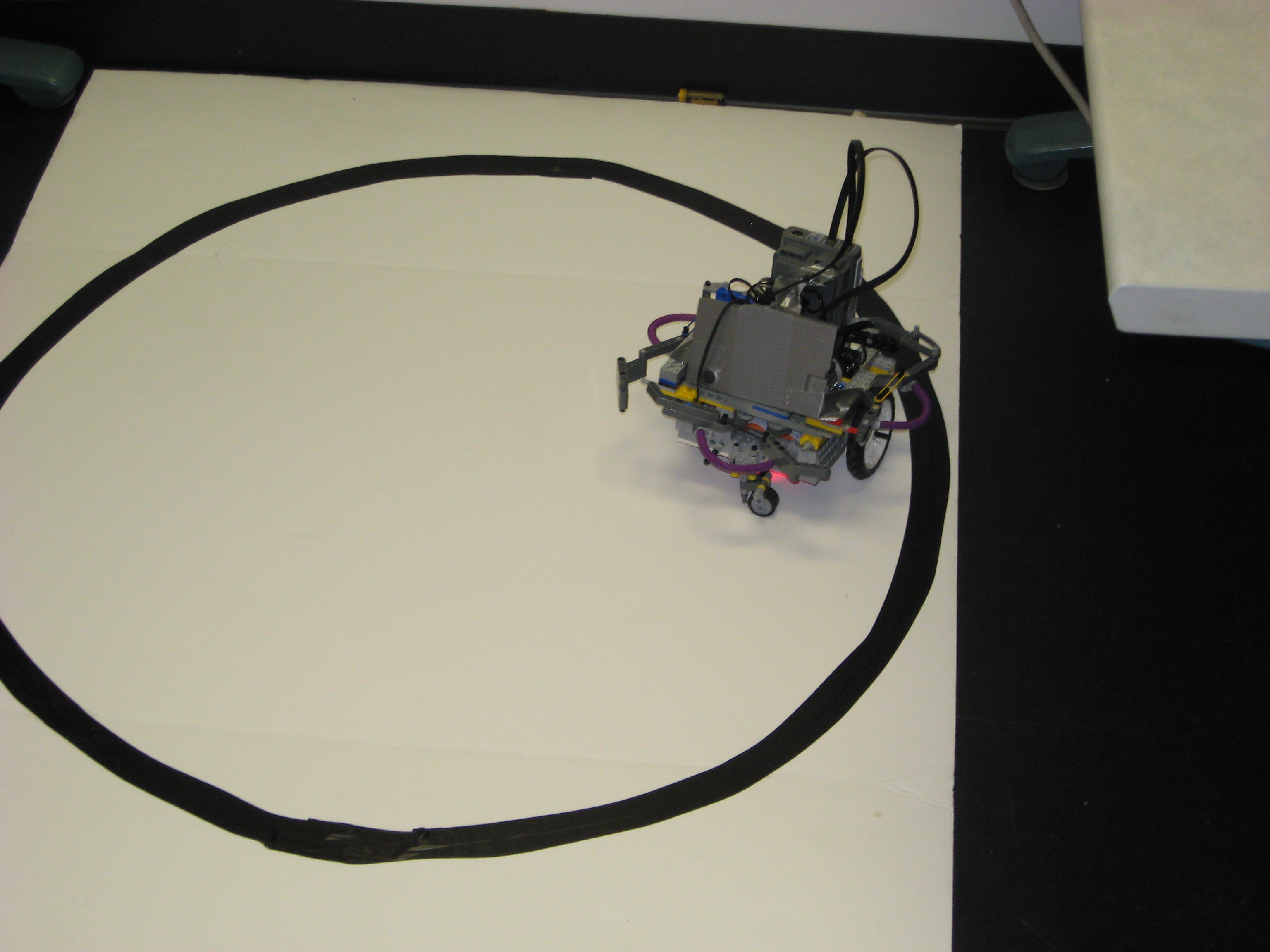
Sumo Robot - Caitrin Eaton and Sam McCauley
A robot to compete in a sumo wrestling match against a human-operated RC car. The robot uses a sturdy mechanical design, a dual-differential drive chassis, one light sensor, 2 bumper sensors, and a behavior-based control algorithm to stay within the arena while reacting to opponent attacks.
| Final demo photo [[SumoRobot.jpg]] |
|
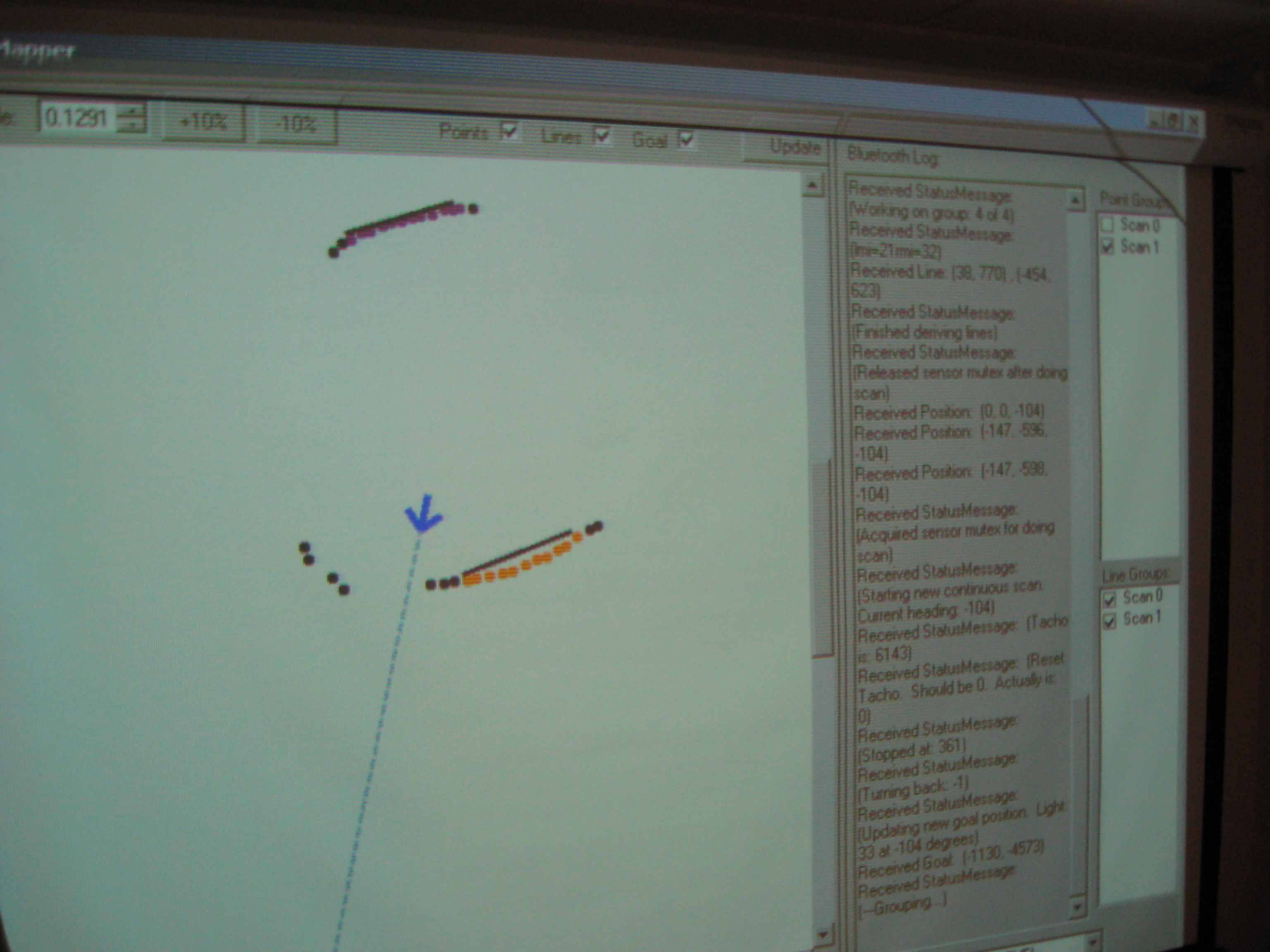
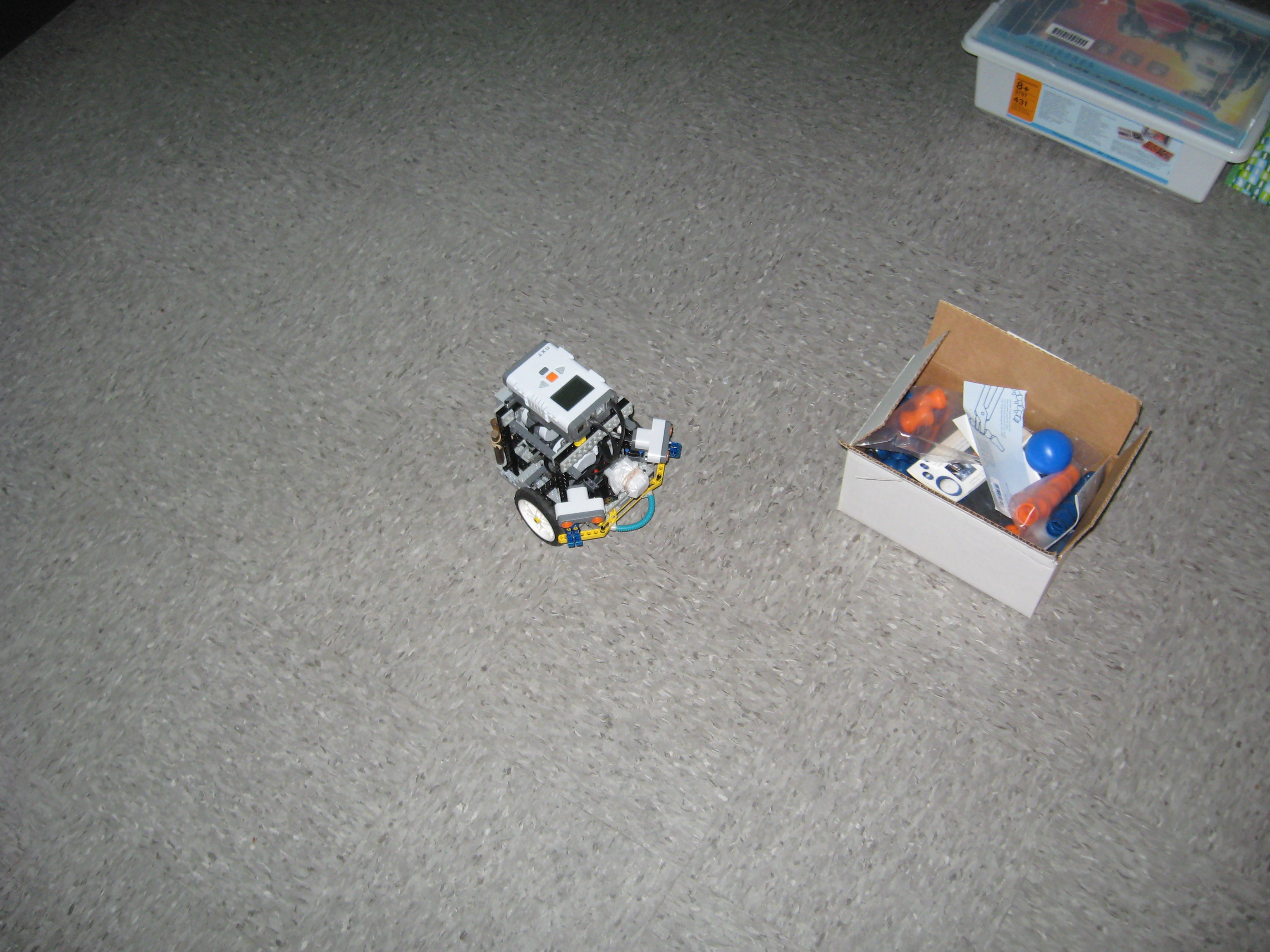
Mapper Robot - Danny Walters and Mark Pellegrini
A robot to map an unknown environment using sonar sensor readings. The robot has a dual-differential drive, a bumper sensor for collision detection, and a sonar sensor. It uses geometric reasoning to convert raw sonar data into line segment estimates and build a map.
| Final demo photos [[MapperRobot.jpg]] [[MapperDsiplay.jpg]] | Final demo video [[MapperRobot.mov]] double-click to start |
|